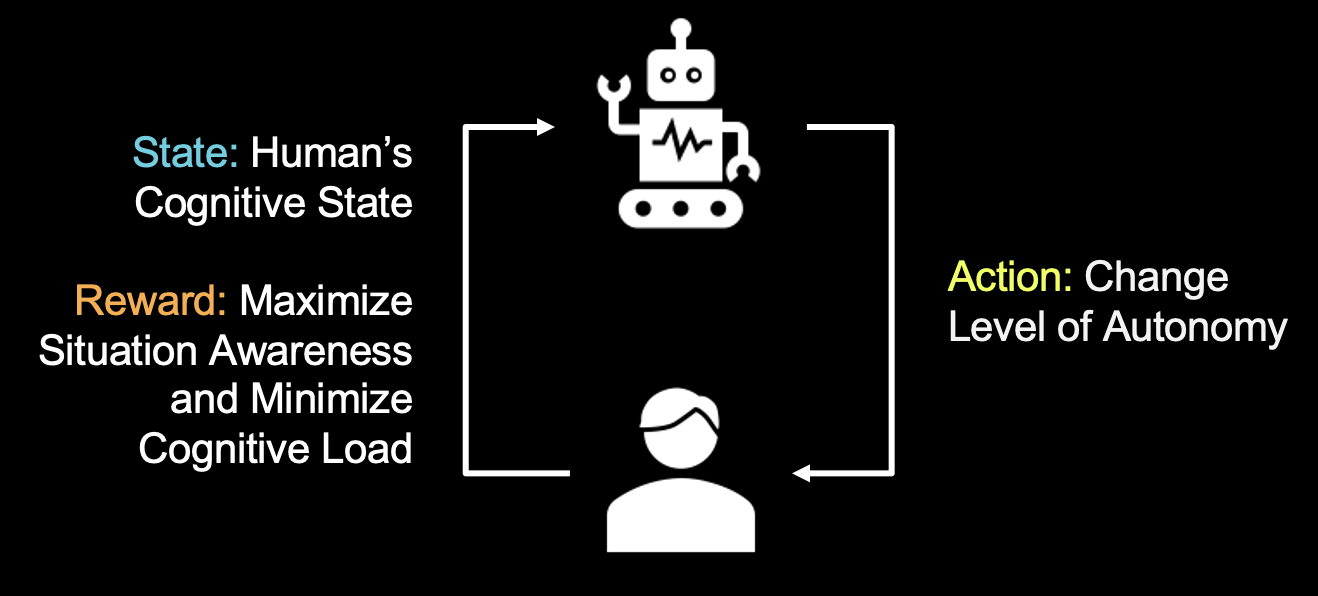
Adaptive Performative Autonomy
Developed reinforcement learning algorithms that dynamically adjust a robot’s level of autonomy based on a human collaborator’s cognitive load and situation awareness. Evaluated in a human-subjects study (n=119) against a heuristic baseline.